https://doi.org/10.1140/epjb/s10051-024-00809-x
Regular Article - Statistical and Nonlinear Physics
Two-layer network evolutionary game model applied to complex systems
Guangdong Provincial Key Laboratory of Intelligent Transportation System, School of Intelligent Systems Engineering, Shenzhen Campus of Sun Yat-sen University, 518107, Shenzhen, China
Received:
5
September
2024
Accepted:
14
October
2024
Published online:
1
November
2024
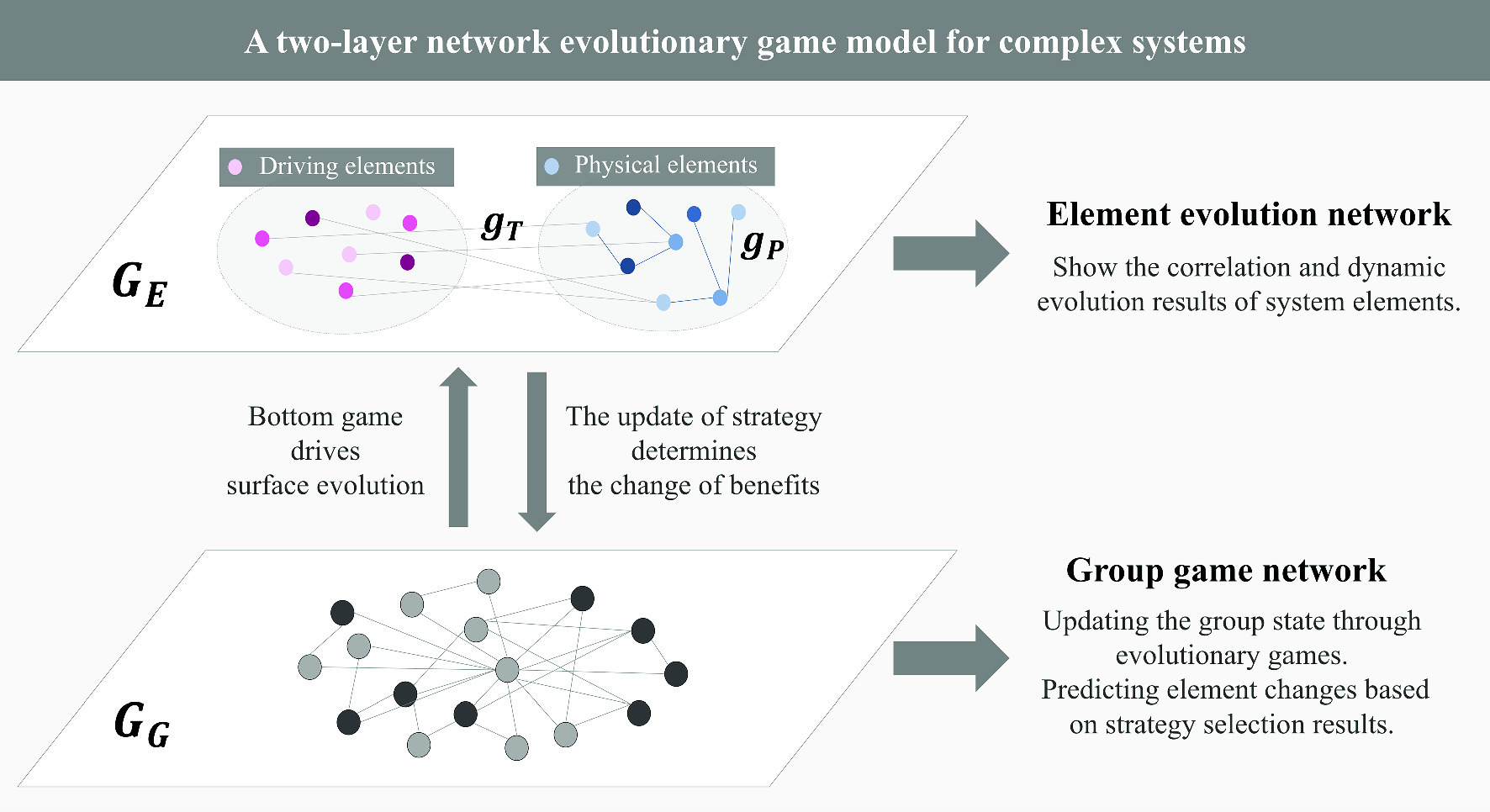
Elements within a system undergo dynamic changes, steering its evolution. However, the heterogeneity and complex interconnections of real-world system elements make it difficult for single-layer network game methods to effectively integrate with reality and describe the evolutionary process. To tackle this issue, we propose a complex network-based two-layer evolutionary game model, applicable to complex systems. This model includes the element evolution network and the group game network. The surface layer presents the relationships and developmental trends of system elements, while the underlying layer simulates participant strategy optimization, which in turn drives the evolution of the surface layer. To enhance practical applications, this paper abstracts elements as strategies and extends the participant’s strategies into combinations of multiple strategies. This approach overcomes the limitations of finite strategy options in traditional 2 2 game models. In this paper, the cross-citation data from the literature and the Bidirectional Encoder Representations from Transformers (BERT) model are employed to measure the system evolution-related strategy values. Through mathematical reasoning, it is determined that the number of elements is a critical factor influencing time-sensitivity in simulations across various scenarios. This paper conducts a system evolution analysis using the Intelligent Transportation System (ITS) as a case study. Initially, the electric vehicle popularization (EVP) scenario, characterized by relatively mature market development, is employed for model calibration. The experimental results show that the relative error of the calibrated model is 0.3132 and the absolute error is 0.0138. Compared to traditional fitting models, the output evolutionary trajectory aligns significantly with real-world conditions. Based on the calibration parameters, an application analysis is conducted on the cooperative vehicle infrastructure (CVI) scenario, which reflects the level of intelligence in ITS. The analysis predicts market evolution trends for different levels of autonomous vehicles, providing a scientific foundation for decision-making processes within governments and enterprises.
2 game models. In this paper, the cross-citation data from the literature and the Bidirectional Encoder Representations from Transformers (BERT) model are employed to measure the system evolution-related strategy values. Through mathematical reasoning, it is determined that the number of elements is a critical factor influencing time-sensitivity in simulations across various scenarios. This paper conducts a system evolution analysis using the Intelligent Transportation System (ITS) as a case study. Initially, the electric vehicle popularization (EVP) scenario, characterized by relatively mature market development, is employed for model calibration. The experimental results show that the relative error of the calibrated model is 0.3132 and the absolute error is 0.0138. Compared to traditional fitting models, the output evolutionary trajectory aligns significantly with real-world conditions. Based on the calibration parameters, an application analysis is conducted on the cooperative vehicle infrastructure (CVI) scenario, which reflects the level of intelligence in ITS. The analysis predicts market evolution trends for different levels of autonomous vehicles, providing a scientific foundation for decision-making processes within governments and enterprises.
Copyright comment Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
© The Author(s), under exclusive licence to EDP Sciences, SIF and Springer-Verlag GmbH Germany, part of Springer Nature 2024
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.